
Smart Parking
Introduction
01-Jan-2045
Web Design
15 Comments
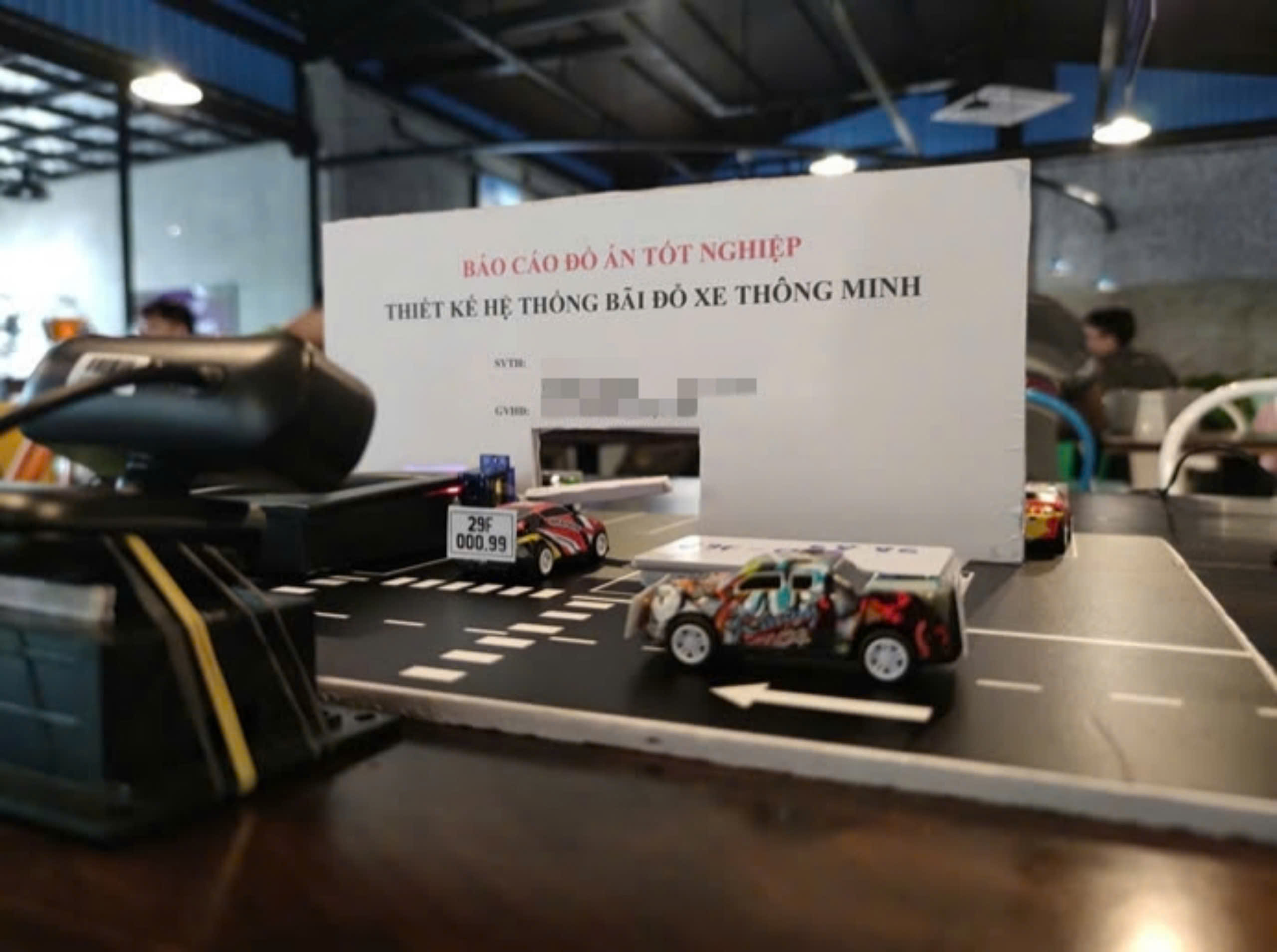
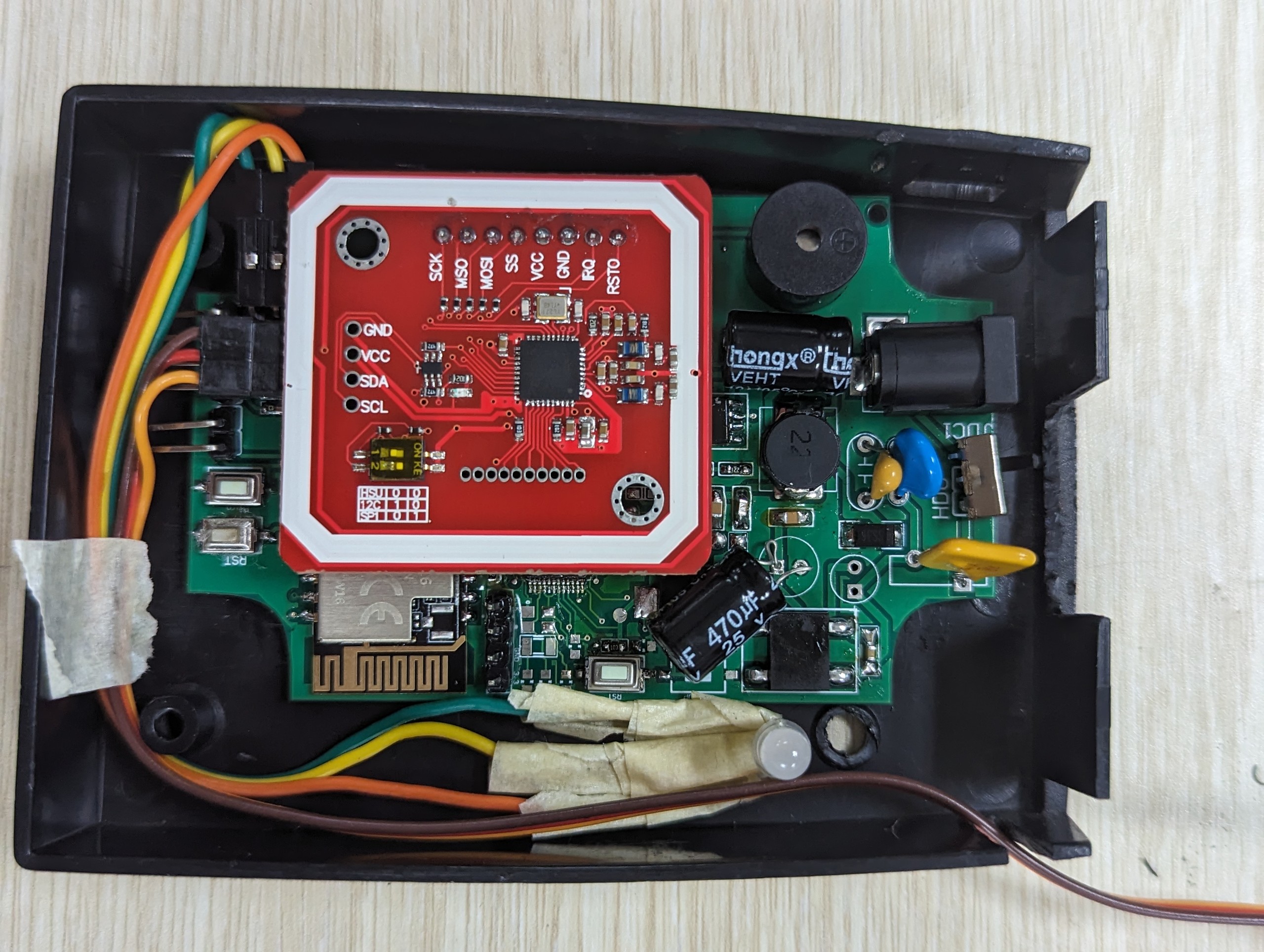
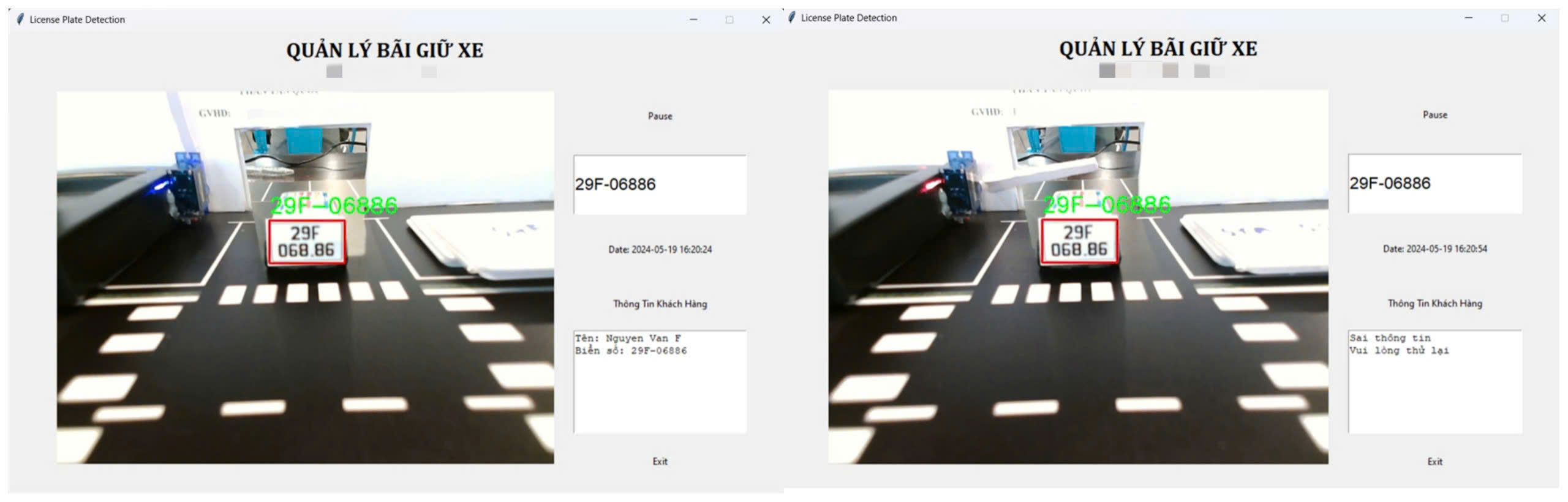
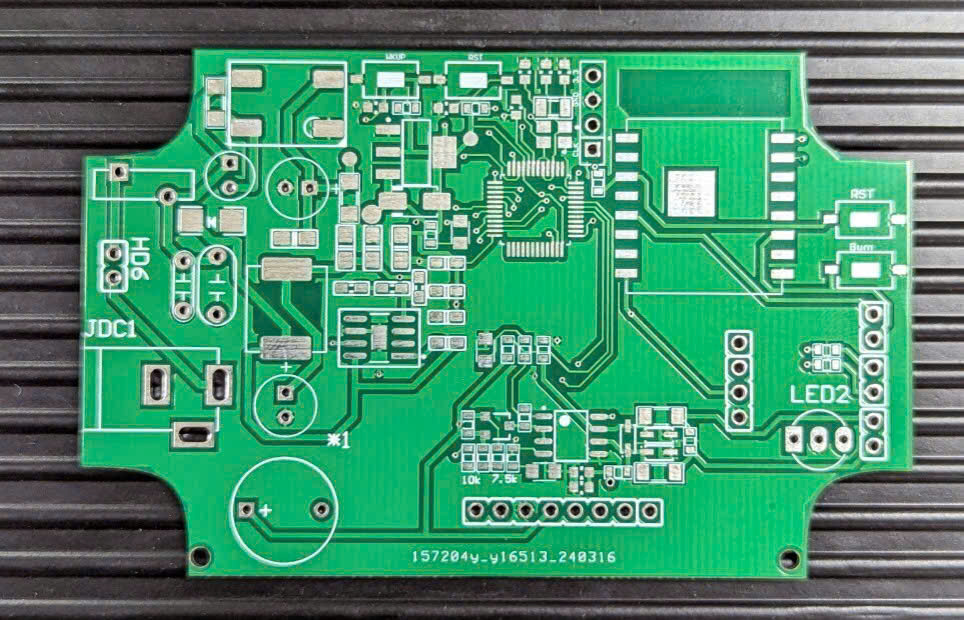
This project was specifically designed and built to compete in the Graduation project. It features automatic license plate recognition through image processing and NFC/RFID technology
Smart Parking
This project includes the source code and PCB layout for the Micromouse robot, which is developed using the STM32F103C8T6 microcontroller. The robot is equipped with an MPU6050 inertial measurement unit (IMU) for motion tracking and orientation, distance sensors (GP2Y0A41SK0F) for obstacle detection, and motor encoders to ensure precise movement control.
Hardware Components
- Microcontroller (MCU): STM32F103C8T6
- IMU Sensor: MPU6050 (for motion sensing and compass functionality)
- Motor and Encoder: Provides precise movement control
- Motor Driver: TB6612 for efficient motor control
- Distance Sensor: GP2Y0A41SK0F (for obstacle detection)
- Power Modules:
- Mini 560 (5V) Regulator
- AMS1117 (3.3V) Regulator
Firmware Features
- PID Control: Ensures smooth and accurate motor movements.
- Compass Function: Uses MPU6050 to assist in orientation and navigation.
- Maze-Solving Algorithm: Implements the Flood Fill Algorithm (DFS-based) to navigate the maze efficiently.
- PID Control: Ensures smooth and accurate motor movements.
- Compass Function: Uses MPU6050 to assist in orientation and navigation.
- Maze-Solving Algorithm: Implements the Flood Fill Algorithm (DFS-based) to navigate the maze efficiently.
Mechanical Case
The robot case is designed in SolidWorks with a lightweight and sturdy mica base.
Micromouse Simulation
A C-based simulation of the Flood Fill Algorithm is implemented to optimize the maze-solving logic before applying it to the physical robot.
This project is a work in progress, with continuous improvements being made to enhance performance and efficiency. 🚀
Leave a comment
© Minh Tuan blog. All Rights Reserved. Designed by Minh Tuan